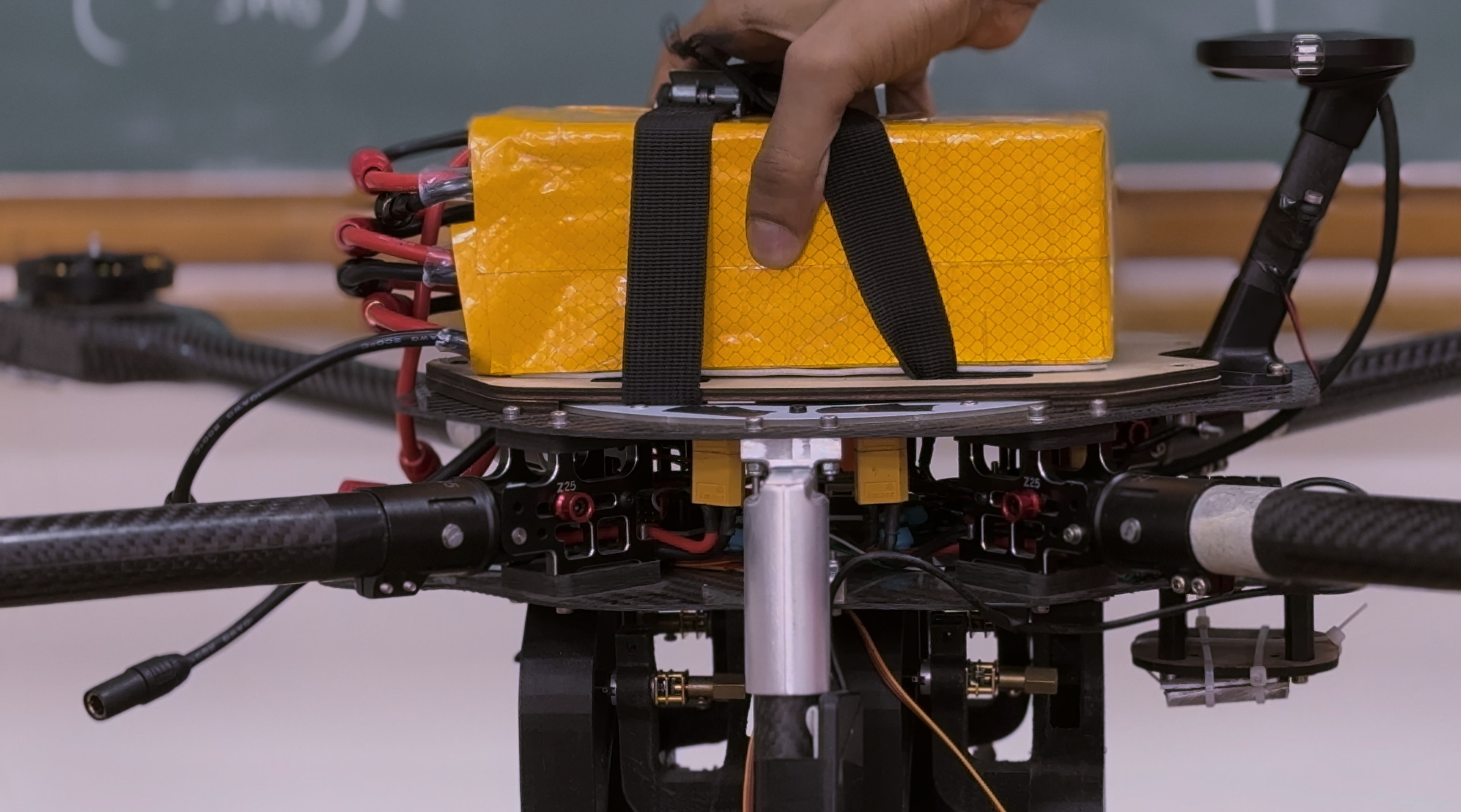










Ready to Fly. Ready to Conquer.
Use the navigation buttons to follow each step of our drone testing process.
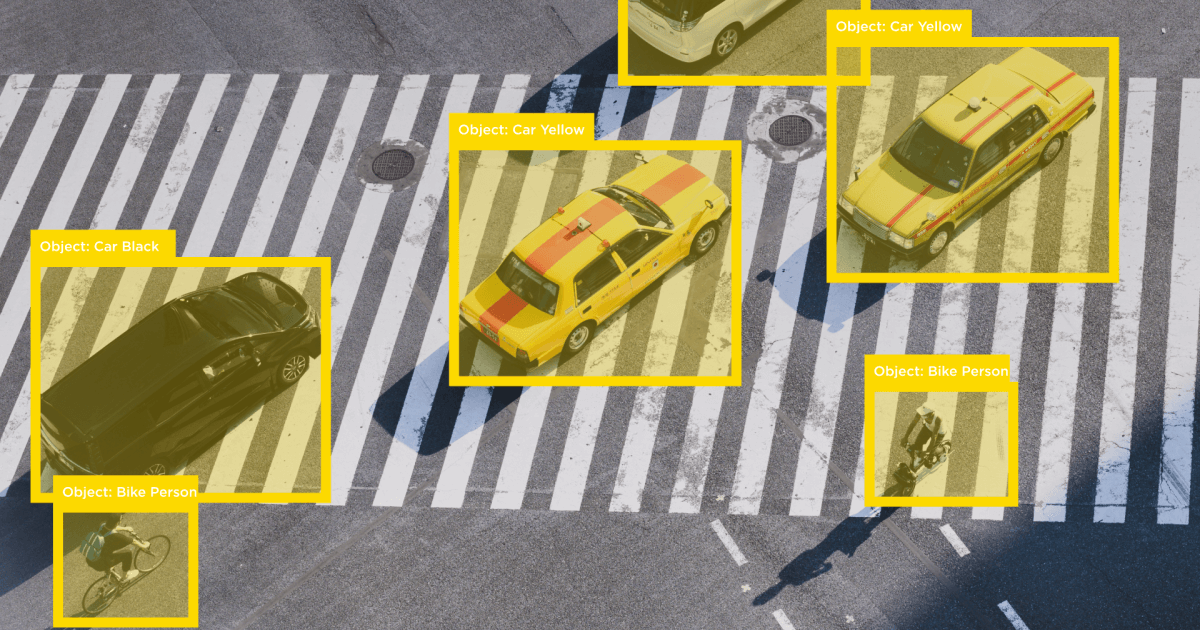
Prepared For Any Challenge
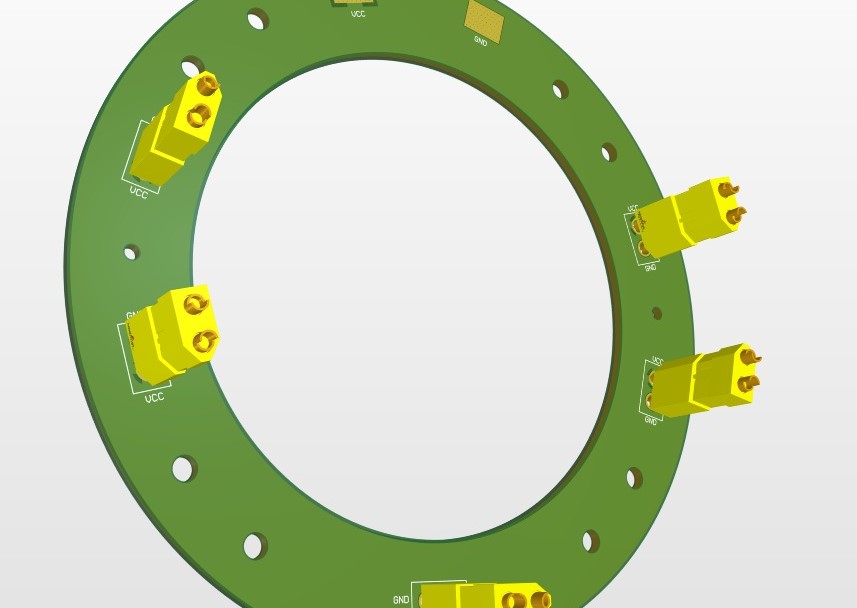
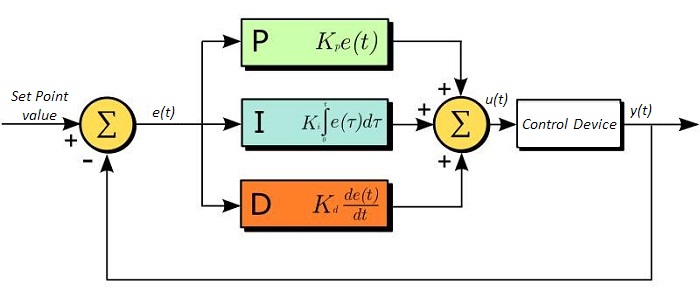
Analyse It Before You Build It
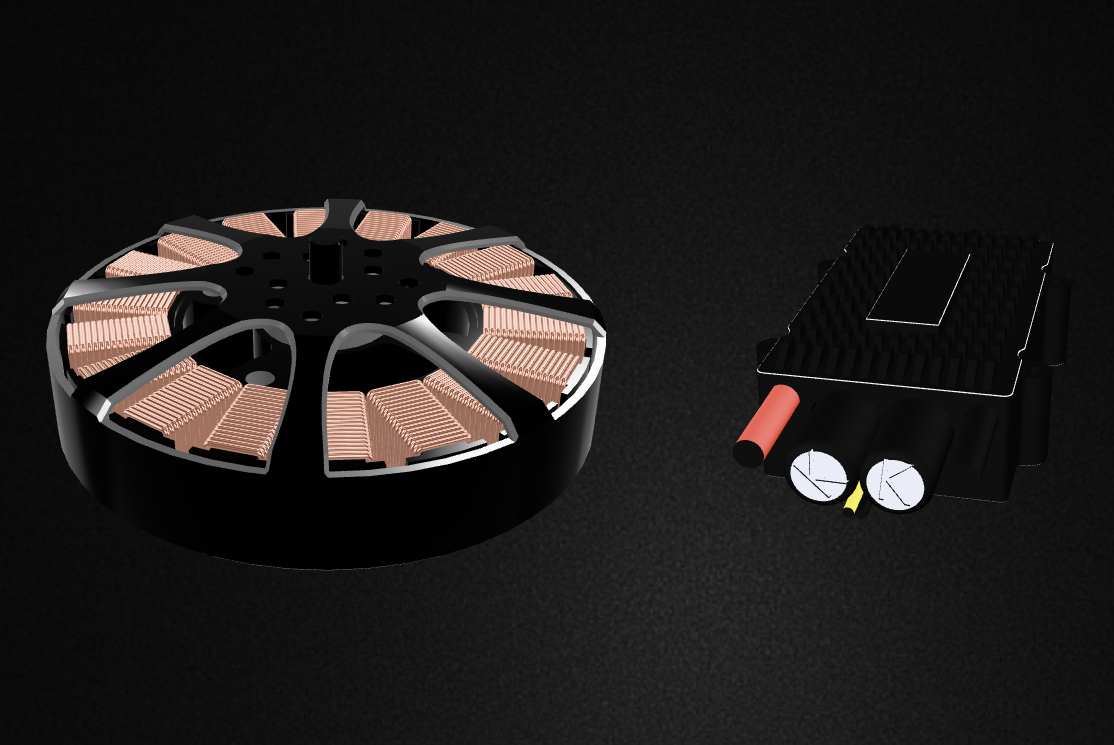
From Concept To Craft
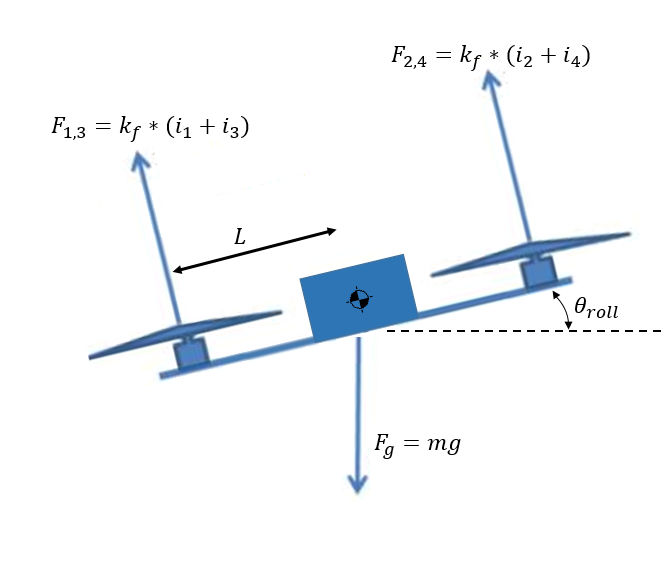
Engineered For Balance
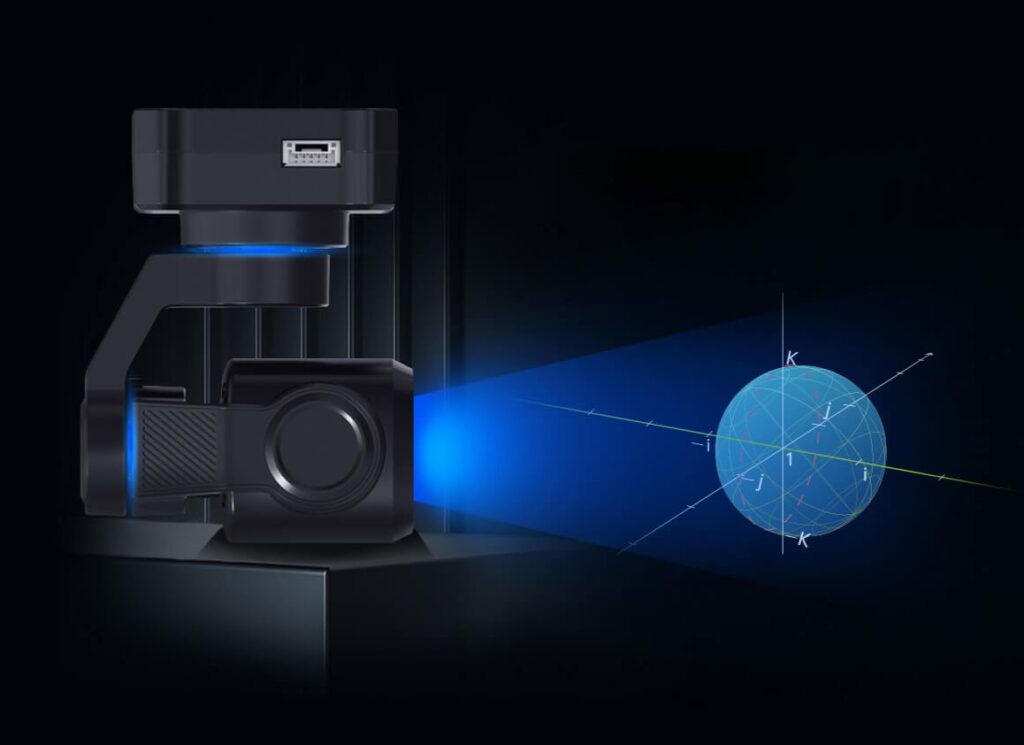
See Sharper Fly Smarter
Precision In Every Direction
Every System. Fully Cleared