1. Initial Setup
Our tuning process began with a conservative baseline PID profile. We used the flight controller’s built-in autotuning routines to establish a stable foundation suitable for test flights. This created a safe starting point for further refinements.
2. Hybrid Tuning Strategy
Rather than relying solely on automated tuning, we implemented a hybrid approach. During each flight, our pilot evaluated responsiveness, smoothness, and any tendencies toward oscillation. Simultaneously, onboard systems recorded real-time flight data for post-flight analysis.
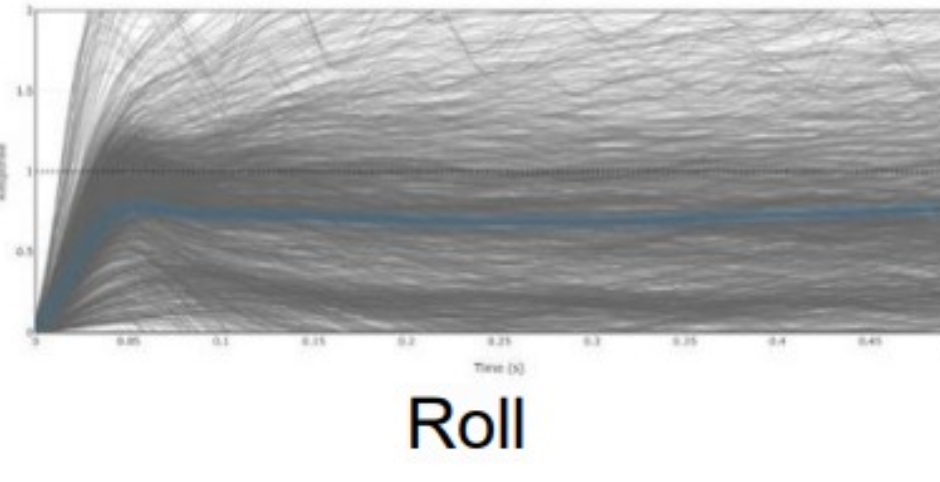
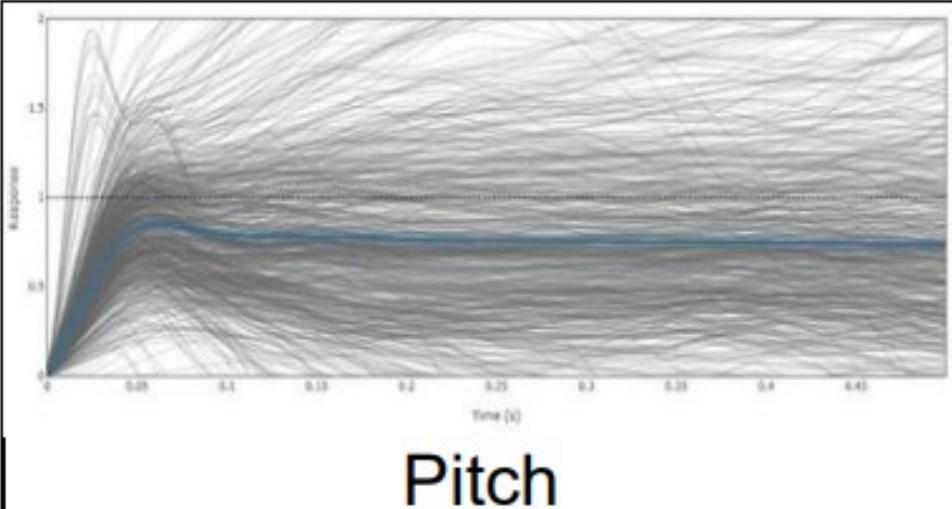
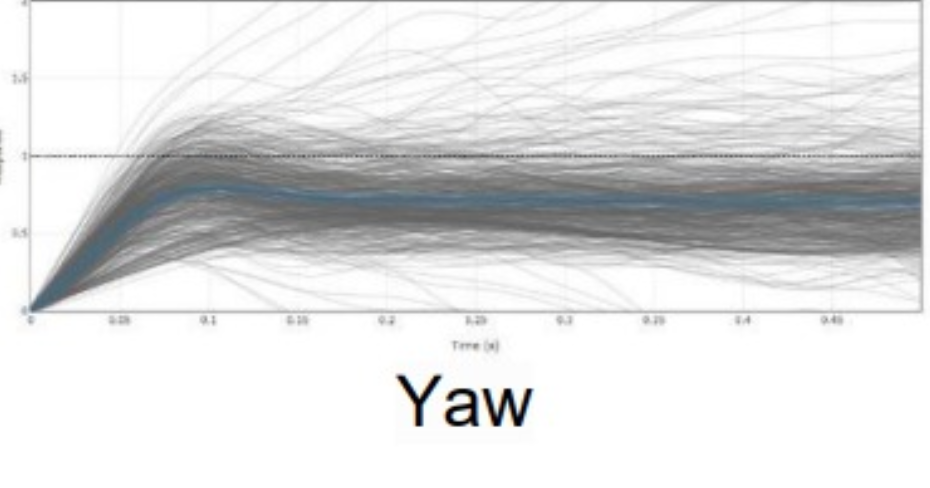
3. Log-Based Analysis
After each flight, we reviewed detailed logs to extract system performance metrics such as step response, rise time, overshoot, and settling time. These data points informed precise adjustments to the proportional, integral, and derivative terms.
4. Iterative Refinement
By alternating between data analysis and pilot input, we iteratively improved the control system. This continuous feedback loop allowed us to fine-tune the gains to achieve optimal stability—even under worst-case conditions.
5. Wind Compensation
To further enhance robustness, we integrated a real-time wind-speed estimator into the control loop. This feature enables the drone to counteract gusts and headwinds dynamically, maintaining its intended trajectory with minimal deviation.