Selecting the Optimal Camera for Autonomous Aerial Imaging Missions
In the development of autonomous aerial systems, the choice of onboard imaging hardware is critical. Factors such as field of view (FOV), sensor resolution, weight, interface compatibility, shutter type, and system integration must be carefully evaluated to meet mission requirements like real-time processing, motion compensation, and data transmission.
Mission Requirements and Camera Selection Criteria
Our imaging system was designed to support a wide range of autonomous mission tasks including mapping,
1. Minimizing motion blur from aerial movement
2. Reducing overall payload weight for longer endurance
3. Achieving high-resolution imagery suitable for photogrammetry
4. Ensuring low-latency real-time data processing
5. Seamless integration with the flight controller for gimbal stabilization and synchronized triggering
These criteria guided our evaluation of several camera platforms.
ADTi Surveyour V3

Resolution: 6000×4000 (24MP)
Weight: 108g
Interface: Micro-USB
Shutter Type: Global Shutter
Pros: Lightweight, high resolution
Cons: Requires external gimbal
Sony Alpha 6000

Sensor: 24.3 MP APS-C CMOS
Weight: ~344g
Shutter Type: Mechanical
Pros: Excellent image quality
Cons: Heavy, bulky, requires power-hungry gimbal
Arducam IMX477

Pros: Lightweight, customizable
Cons: Rolling shutter artifacts
Poor synchronization at high speeds
Unsuitable for precision mapping
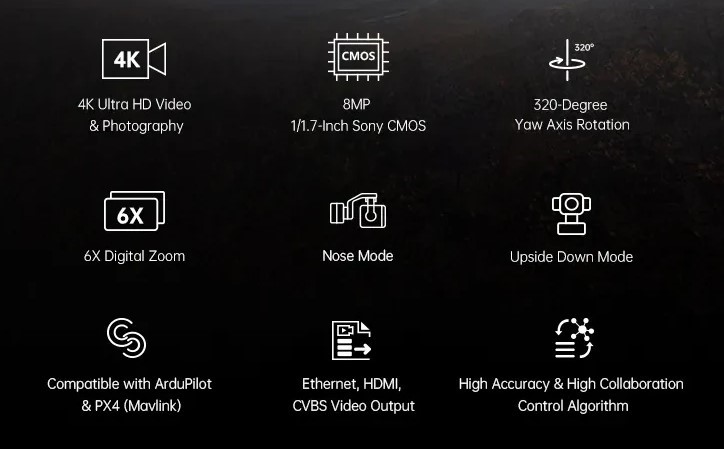
SIYI A8 MINI – Final Selection
Sensor: EO/IR with Global Shutter
Resolution: 4K
Interface: Ethernet (IP protocol)
Gimbal: Integrated 3-axis

Why the SIYI A8 Mini Was Chosen
The SIYI A8 Mini offered the best trade-off between performance, integration, and weight. It fulfilled all major requirements:
1. Global Shutter: Crucial for accurate orthomosaic map generation and object recognition.
2. Lightweight Integrated Design: Avoids extra gimbal hardware while keeping video stable.
3. Ethernet Interface with IP Streaming: Enables low-latency transmission to ground and edge computing.
4. System Compatibility: Supports MAVLink for GPS sync and adaptive ROI tracking.
While 4K resolution slightly limits mapping accuracy compared to APS-C cameras, the benefits of integration, lower weight, and global shutter make it ideal for real-time object tracking and mapping.
Conclusion
Camera selection for drone-based autonomous missions is not just about megapixels—it involves a careful balance of multiple parameters to meet specific operational constraints. In our system, the SIYI A8 Mini emerged as the optimal choice, delivering real-time, high-quality imagery with minimal system overhead. Its design aligns well with modern UAV requirements—especially in missions that demand autonomy, low latency, and high integration efficiency.