Need to Perform Calculations
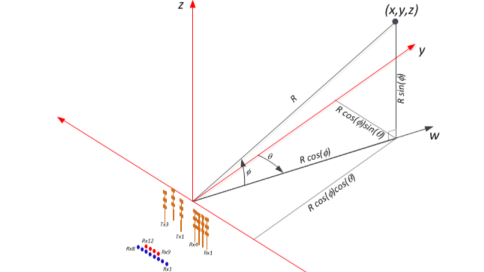
Every time the drone moves or changes direction, it calculates new vectors to figure out exactly where to go. It uses things like GPS and motion sensors to understand where it is in space and how fast it's moving. If it needs to speed up, slow down, or turn, it adjusts its direction and force using these vector calculations. thus performing these 3D vector calculations helps in selecting efficient propulsion system.
Calculation Considerations
Battery
27000 mAh, 25.2 V
Current Draw per motor
12.27 A (According to datasheet)
Estimated Flight Time
~33 minutes
Mass of the drone
7.8 Kg
Thrust per motor
> 22.066N
Drone calculation angle
30 degree
Step by Step Calculations
1. Weight calculation
Weight = Mass x gravitaional acceleration
Weight = 7.8 x 9.8 = 76.44 N
2. Component calculation (angle = 30 degree)
T x cos(angle) = Mass x g
T = 76.44/cos(30) = 88.265 N
Thrust per motor = 22.066 N

Considering the atmospheric conditions and aerodynamic conditions for the maneuverability of the drone,
buffer amount of motor thrust was taken into consideration.
Therefore the thrust per motor was taken to be 26.0175N.
3. Current Draw per motor
Find the value of the current draw from the datasheet given.

Current draw per motor = 12.27 A
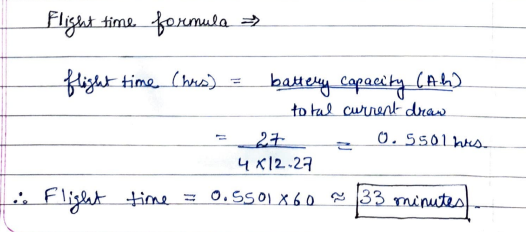
4. Flight Time
Time = (Battery capacity(Ah) / total current draw) × 60
Time = (27 / 4 x 12.27) × 60 = 33.007 minutes
Diagrams & Visuals