Overview
One of the key features of our SUAS object detection system is its ability to not only identify objects from the air but also estimate their exact location on the ground. We developed a lightweight localization method that converts an object's position in the image (given as pixel coordinates) into global GPS coordinates, providing accurate location data in the real world.
How the System Works
The process begins when the drone's camera detects an object in its view. Each detection provides pixel coordinates (x, y), which indicate where the object appears in the image. However, pixel coordinates alone don’t tell us where the object is located on the ground. To overcome this, our algorithm uses the following method to estimate the real-world location:
Estimating Distance
We calculate the object's distance from the center of the image using the camera’s field of view, the image size, and the drone’s current altitude. This allows us to estimate how far the object is from the drone in three-dimensional space.
Adjustment Using Drone Heading and GPS
The system then adjusts the estimated position by considering the drone's current heading (the direction it’s facing) and its GPS data. This information helps calculate the north and east offset from the drone’s location, giving a more accurate understanding of the object’s position on the ground.
Final GPS Calculation
Using these adjustments, we compute the object's final GPS coordinates. This allows the drone (or a ground controller) to know the precise location of the object in the real world.
Reverse Calculation for Testing and Planning
Our system also works in reverse. If we already know the GPS location of a target, we can calculate where it will appear in the camera's image. This feature is useful for various purposes, including:
Accuracy Testing: Verifying the accuracy of the system’s GPS predictions.
Flight Planning: Determining how objects will appear in the camera feed during specific flight paths.
Real-time Visualization: Drawing real-time visuals on the camera feed based on the known GPS coordinates of objects.
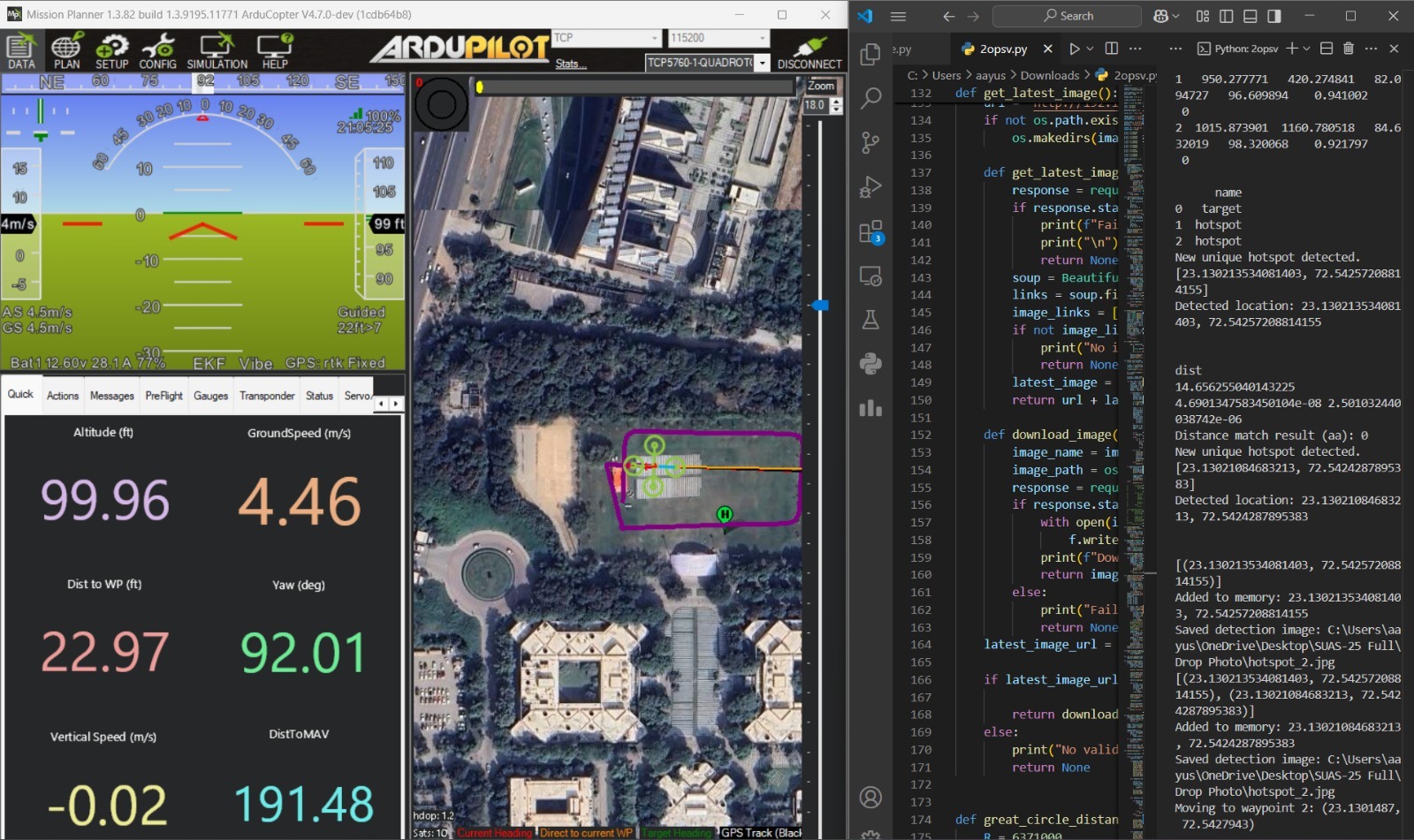
Testing and Performance
We have thoroughly tested this system in various conditions, and it has consistently provided reliable and accurate results.